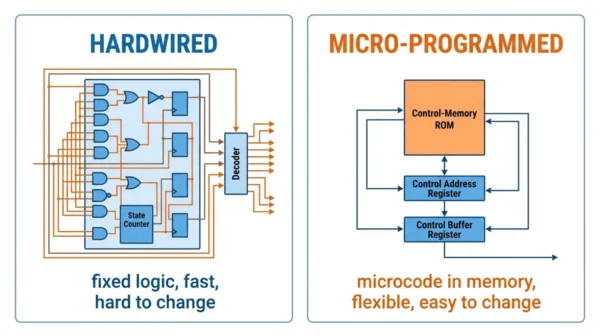
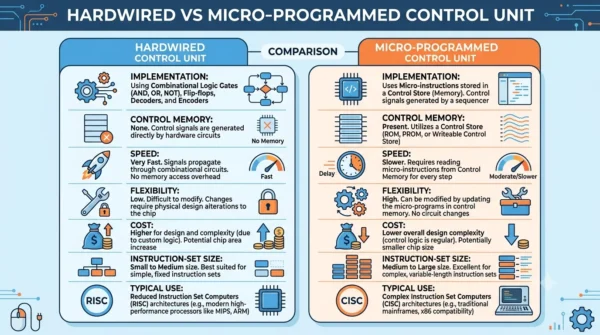
A hardwired control unit generates control signals with fixed sequential logic, such as gates, flip-flops, and a decoder, so it is fast but hard to change. A micro-programmed control unit stores those signals as microinstructions in a special control memory, so it is slower yet easy to modify. In short, the hardwired design trades flexibility for speed, while the micro-programmed design trades speed for flexibility.
The control unit is the part of the CPU that tells every other part what to do. It reads each instruction and then fires the right control signals in the right order. So designers build it in one of two ways, and computer organisation courses test both.
The core question is simple. Should the control logic be wired into fixed hardware, or stored as code in memory? A hardwired unit takes the first path, while a micro-programmed unit takes the second. This guide defines each design, compares them in detail, and shows where each one fits.
Because this topic sits right beside instruction-set design, it helps to know the difference between RISC and CISC first. It also pairs well with the basics of a microprocessor and a microcontroller.
What is a Hardwired Control Unit?
A hardwired control unit builds its control logic directly into fixed circuits. So it uses combinational logic gates, flip-flops, decoders, and a sequence counter or state register to produce control signals. Each instruction maps to a fixed path through that hardware.
Because the signals come straight from logic gates, there is no memory to fetch from. As a result, the unit runs very fast and reacts with minimal latency. This precision suits real-time systems and high-performance computing, where every cycle counts. The catch is rigidity: changing the design means rewiring the circuit, so it is costly to modify. For that reason, the hardwired approach suits RISC chips and small, fixed instruction sets.
Advantages of a hardwired control unit:
- Very fast execution, because no control-memory access is needed.
- Low latency, so it fits real-time and high-performance systems.
- Energy efficient, since the streamlined logic does less work per step.
- A natural match for RISC and small fixed instruction sets.
Disadvantages of a hardwired control unit:
- Hard to modify, because any change means redesigning the circuit.
- Costly and slow to redesign once the layout is fixed.
- Difficult to scale to large or complex instruction sets.
- Decoding logic grows messy as the instruction count rises.
What is a Micro-Programmed Control Unit?
A micro-programmed control unit stores its control logic as code instead of wiring it. So each control signal lives inside a special control memory, also called the control store or control ROM. Every machine instruction maps to a small program of microinstructions there.
When the CPU runs an instruction, the unit fetches the matching microprogram one microinstruction at a time. Each microinstruction then sets the control signals for one step. This extra memory access makes the unit slower than the hardwired kind. However, it brings real flexibility, because you change behaviour by editing the microcode rather than the hardware. For that reason, the micro-programmed approach suits CISC chips and large, complex instruction sets.
A micro-programmed control unit has a few key parts:
- Control Memory (CM): the store that holds all the microinstructions.
- Control Address Register (CAR): the micro-PC that points to the next microinstruction.
- Control Buffer Register (CDR): the register that holds the current microinstruction being executed.
- Sequencer: the next-address generator that decides which microinstruction comes next.
Advantages of a micro-programmed control unit:
- Easy to modify, because you just rewrite the microcode in memory.
- Cheaper to design and update than rewiring fixed logic.
- Handles large, complex instruction sets with ease.
- Decoding stays simpler and more regular, even as instructions grow.
Disadvantages of a micro-programmed control unit:
- Slower, since each microinstruction needs a control-memory read.
- Needs extra control memory, which adds hardware and cost there.
- Higher per-instruction latency, so it lags in time-critical work.
Hardwired vs Micro-Programmed Control: Comparison Table
| Aspect | Hardwired Control Unit | Micro-Programmed Control Unit |
|---|---|---|
| Implementation | Fixed hardware logic generates the signals | Software microcode generates the signals |
| Control memory | None used | Uses control memory (control store) |
| Signal source | Gates, flip-flops, decoders, sequence counter | Microinstructions read from control memory |
| Speed | Fast | Slow |
| Flexibility | Not flexible | More flexible |
| Ease of modification | Difficult to modify | Easy to modify |
| Decoding | Difficult to perform decoding | Easy to perform decoding |
| Instruction set size | Small instruction set is used | Large instruction set is used |
| Complex instructions | Difficult to handle | Easy to handle |
| Cost | More expensive to design and change | Less expensive to design and change |
| Architecture fit | Used in RISC | Used in CISC |
| Energy use | Lower, due to streamlined logic | Higher, due to control-memory access |
| Latency | Minimal, near real-time | Higher, per microinstruction |
| Best for | Real-time, high-performance systems | Evolving, complex instruction sets |
| Scalability | Hard to scale to many instructions | Scales well to many instructions |
| Design effort | High, since each instruction is wired | Lower, since logic lives in microcode |
How They Generate Control Signals
The clearest way to see the gap is one micro-task: fetch an instruction, then add two registers. Both units must raise the same control signals, yet they reach them differently.
On a hardwired unit, a sequence counter steps through fixed states. At each state, decoders and logic gates read the opcode and assert the right signals directly. So the path from opcode to signal is pure wiring, and it resolves in almost no time. To support a new instruction, though, an engineer must redesign that logic.
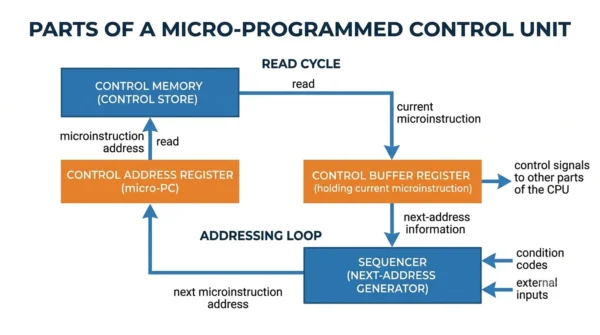
On a micro-programmed unit, the control address register points into control memory. The unit then reads the addressed microinstruction into the control buffer register, and those bits become the control signals for that step. Next, the sequencer computes the following address, and the cycle repeats. Each step costs one control-memory read, which is why the design runs slower. Still, adding an instruction means writing a new microprogram, not rewiring a chip.
Horizontal vs Vertical Microprogramming
Micro-programmed units come in two flavours, and the choice shapes the microinstruction width. So it is worth knowing both for exams.
Horizontal microprogramming uses a wide microinstruction with roughly one bit per control signal. Because the bits map almost directly to signals, decoding stays minimal and many signals can fire in parallel. The downside is size, since the control word grows quite long.
Vertical microprogramming uses a narrow microinstruction with encoded fields instead. A decoder then expands each field into the actual signals. As a result, the control word stays small, yet parallelism drops and an extra decoding step appears. In short, horizontal trades width for speed, while vertical trades speed for compactness.
When to Use Which Control Unit
Selecting the right control unit depends on the application, so weigh speed against flexibility first.
Choose a hardwired unit when raw speed and determinism lead. Real-time systems, high-performance cores, and RISC designs fit here, because each instruction is simple and the timing is tight. So the fixed logic pays off where every cycle matters.
Choose a micro-programmed unit when the instruction set is large or likely to change. CISC chips and systems that evolve fit here, since editing microcode beats rewiring hardware. So flexibility and easy modification win when the instruction set is complex.
In short, hardwired control units shine in scenarios demanding rapid and deterministic execution, while micro-programmed units excel where adaptability and ease of modification are paramount.
Interview Questions
Frequently Asked Questions
Wrapping Up
Hardwired and micro-programmed control units solve the same job from opposite directions. A hardwired unit wires the logic into fixed circuits for speed, while a micro-programmed unit stores it as microcode for flexibility.
Remember the simple rule: hardwired means fast but rigid and RISC, and micro-programmed means flexible but slower and CISC. So the choice between them boils down to a balance between speed and adaptability. Knowing that trade-off is enough to answer most exam and interview questions on the two.
Related reading on DiffStudy: